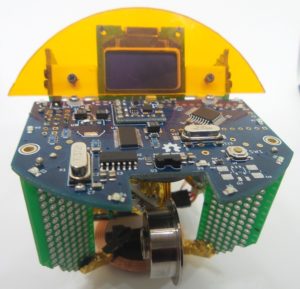
COSMOneer
Platform Specification Document
Overview
The Cosmoneer was started based on an idea that cubesats needed a cheap way to simulate space, including autonomy from all power and data sources. Where cubesats are designed for space, Cosmoneers are designed for everywhere else.
Purpose
This specification is to facilitate quick construction of a terrestrial satellite simulator for experimentation and instruction. It is the hope of this specification that anyone can experience the rigors of spaceflight, without the risk and costs associated with it.
While it may appear these constraints will prevent the user from constructing a simple simulator, their purpose is to limit the environment to one very similar to outer space, where the imposed limitations of space itself have triggered exotic solutions that have advanced modern technology. Dimensional constraints are imposed to facilitate possible adaptation to the cubesat form factor and possible deployment to LEO, were the user so inclined.
Zero-G Simulator Specification
 ENVIRONMENT
ENVIRONMENT
- 1 DOF Yaw axis via nylon suspension tether, minimum length 5cm.
- 3DOF Yaw, Pitch & Roll via tetherless boyant spherical encapsulation riding atop a low friction fluid medium (IE- air, water, etc.)
 POWER SOURCE
POWER SOURCE
- A wireless power source will provide no more than 600mA @5v continuously.
Cosmoneer Simulator Specification
 GENERAL
GENERAL
- Nothing shall protrude beyond a virtual sphere measuring 100mm OD when stowed.
- Structural materials and fasteners may consist of PCBs, plastics, acrylics and/or metals.
- 1DOF tether may attach inside the stowage area and up to 10mm vertically.
- CoG located 10(30mm) from geometric center in the X & Y (& Z) axis for 1 (3) DOF.
 ATTITUDE CONTROL
ATTITUDE CONTROL
- Pointing accuracy must be repeatable +/- 10 degrees where target is 3M from center.
- Attitude control via Control Moment Gyro or Reaction Wheel only.
POWER
- Power reception via wireless source (IE. – solar, thermal, induction, etc.)
- Power plant via on-board storage media or receiver system.
- Recharging of on-board storage media via power receiver system only.
- Total storage energy capacity not to exceed 1500mAh total.
 COMMUNICATIONS
COMMUNICATIONS
- Primary two-way communications shall occur via directional Serial IrDa transceiver only.
- Secondary RF two-way communications are permissible when RF focusing techniques are applied that result in directional comms.
- One-way omni-directional broadcasting is permitted (telemetry, system status, etc.) via any permissible RF frequency.